Abstract—The rich data provided by high-resolution satellite imagery allow us to directly model aerial scenes by understanding their spatial and structural patterns. While pixel- and objectbased […]
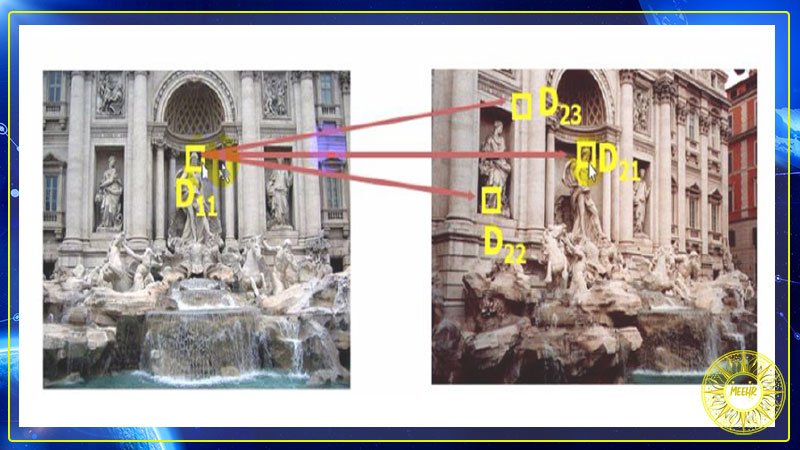
The first step in geometric computer vision tasks such as Simultaneous Localization and Mapping (SLAM), Structure-from-Motion (SfM), camera calibration, and image matching is to extract interest […]