
شبکه ASLFEAT
آوریل 28, 2023شبکه D2NET
می 20, 2023شبکه سوپر پوینت
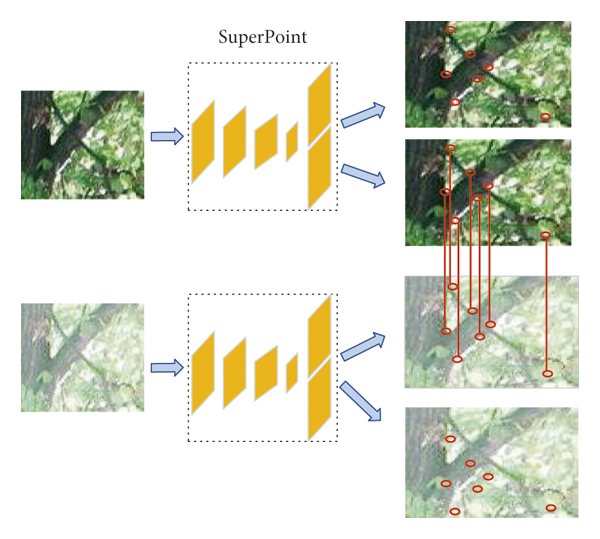
SuperPoint یک چارچوب کاملاً کانولوشنال خود نظارت میسازد که خط لوله تطبیق نقطه کلیدی کامل، یعنی تشخیص، توصیف و تطبیق را پیادهسازی میکند. این روش به جای تکیه بر تکه های تصویر از پیش استخراج شده، بر روی تصاویر با اندازه کامل اجرا می شود تا نقاط کلیدی و و توصیفگرهای مرتبطشان را در سطح پیکسل در یک گذر رو به جلو محاسبه کند. علاوه بر این، در این روش یک مجموعه داده بزرگ با نقاط کلیدی شبه حقیقی توسط خود آشکارساز به جای حاشیه نویسی انسانی تعریف و نظارت می شود. علاوه بر این، یک مجموعه داده بزرگ با نقاط کلیدی شبه حقیقی توسط خود آشکارساز به جای حاشیه نویسی انسانی تعریف و نظارت می شود. ابتدا، برای غلبه بر ابهام در مکان نقطه کلیدی، مجموعه داده مصنوعی از شکل های هندسی ساده با مکانهای دقیق نقطه کلیدی مانند اتصالات Y، اتصالات L، اتصالات T، مراکز بیضیهای کوچک ایجاد میشود. بخش ها مجموعه داده مصنوعی برای آموزش آشکارساز پایه استفاده می شود.
برای تقویت تکرارپذیری آشکارساز بر روی تصویر طبیعی با تغییرات زیاد دیدگاه، تطبیق هموگرافیک برای بهبود هندسی آشکارساز طراحی شده است، که نشان میدهد میتوان یک نقطه کلیدی را در تصاویر تحت تبدیل هندسی مختلف شناسایی کرد.مجموعه داده آموزشی نهایی بر روی تصاویر COCO از طریق تکنیک تطبیق هوموگرافیک ایجاد می شود [8]
آخرین آموزش مشترک روی یک شبکه عصبی کاملاً کانولوشن با دو شاخه انجام شده است که مکان و بردار توصیف نقاط کلیدی را در یک گذر رو به جلو با جفت تصویر به عنوان ورودی محاسبه میکند. در شکل 3 ارائه شده است
SuperPoint [38] یک چارچوب خود نظارتی برای آموزش آشکارسازها و توصیفگرهای نقطه کلیدی ایجاد می کند که برای تعداد زیادی از مسائل هندسی که در بینایی کامپیوتر به خاطر چند نمای ایجاد می شوند, مناسب است [39].
مجموعه داده مصنوعی برای آموزش شبکه آشکارساز پایه ساخته می شود که Magic Point نام دارد. اتخاذ تطبیق هموگرافیک برای تقویت عمومیت Magic Point در تصاویر واقعی در این روش صورت می پذیرد،این مدل بر روی جفتهای تصویر با اندازه کامل عمل میکند و مکانهای نقاط کلیدی، توصیفگرهای مرتبط و نتایج تطبیق را هم زمان ارائه میکند.
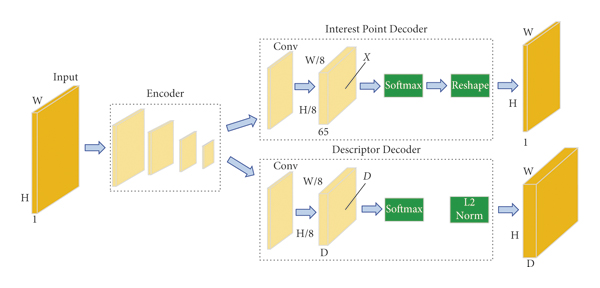
توصیفگر شامل بخش آموخته شده و بخش آموخته نشده است. بخش آموخته شده ابتدا یک شبکه نیمه متراکم از توصیفگرها را خروجی می دهد و سپس در قسمت آموخته نشده، درون یابی و سپس نرمال سازی L2 را انجام می دهد تا اندازه واحد باشد. تابع ضرر مجموع دو تابع ضرر میانی است: یکی برای آشکارساز نقطهکلیدی و دیگری برای توصیفگر